
I will be joining Prof. Siyi Xu’s Group at UIUC in the 2025 fall, working on wearable HRI.
Research Interests: Haptics, Soft Robotics, Surgical Robotics.
- 5+ yrs of research experiences on robotics
- lead/core author of 7 papers including Nature and Science.
- Skillset ranging from rapid prototyping, mechatronics system, machine learning and bio-signal monitoring…

🔥 News
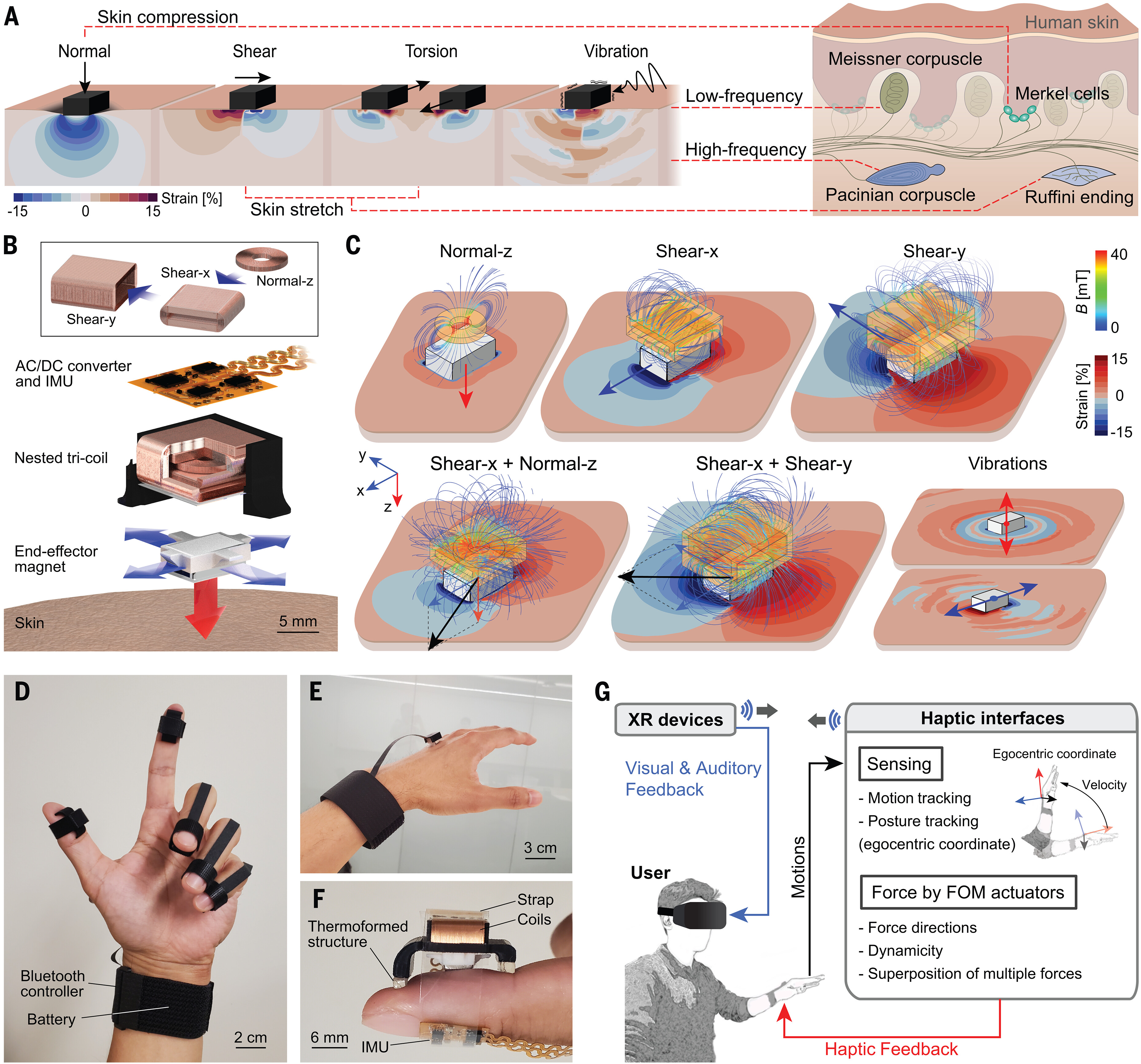
- 2025.03: 🎉🎉 Our paper “Full freedom-of-motion actuators as advanced haptic interfaces” has been published by Science!
- 2025.01: Awarded “Excellent Master Dissertation of School”.
- 2024.12: 🎓 Successfully passed the Master’s dissertation defense, titled “Full Freedom-of-Motion Haptic Actuator for Efficient Information Transfer in XR”. Many thanks to my advisor, Prof. John Rogers, committee member, Prof. Edward Colgate, and best mentor ever, Dr. Kyoungho Ha!
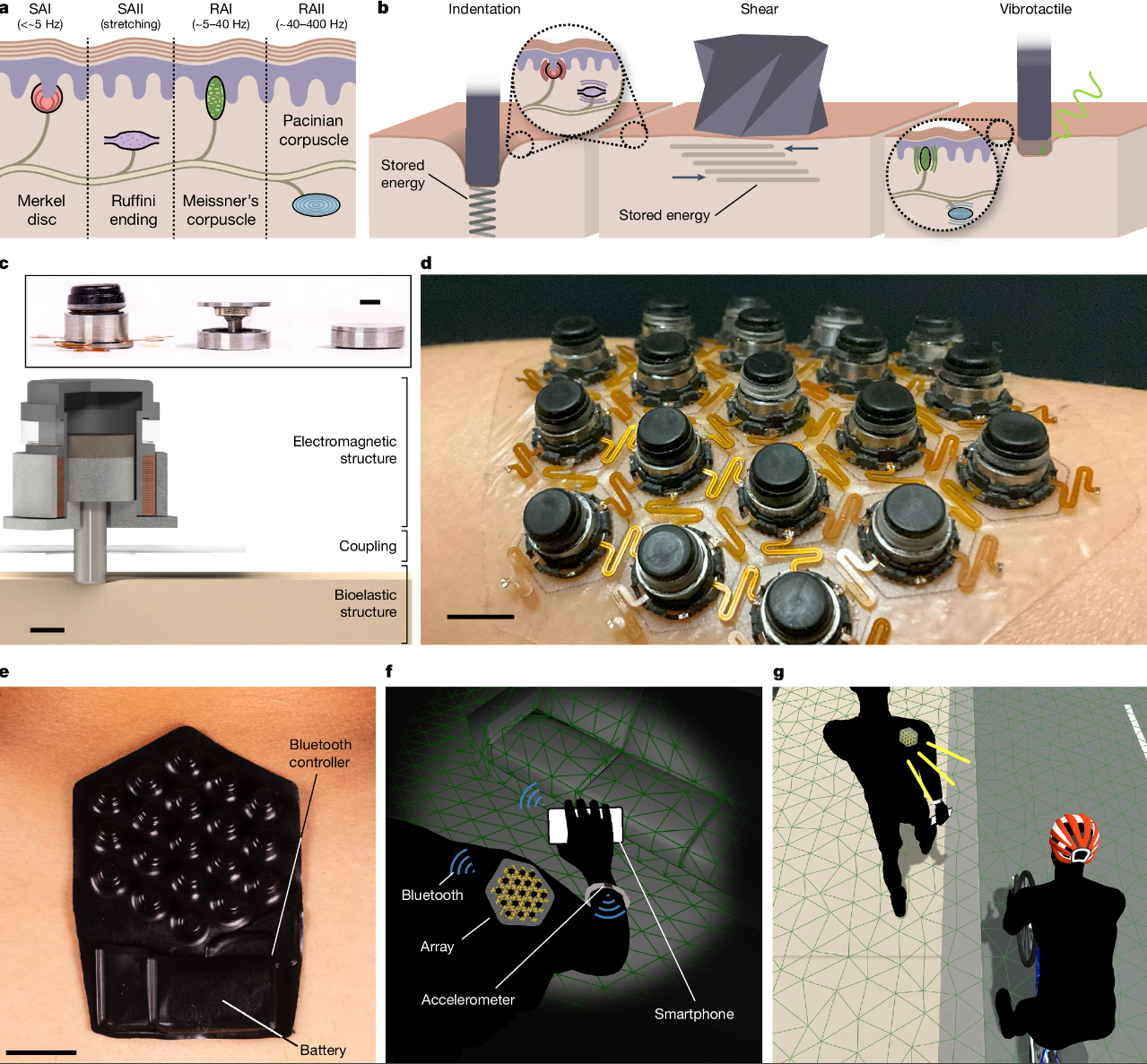
- 2024.10: 🎉🎉 Our paper “Bioelastic state recovery for haptic sensory substitution” has been accepted by Nature!
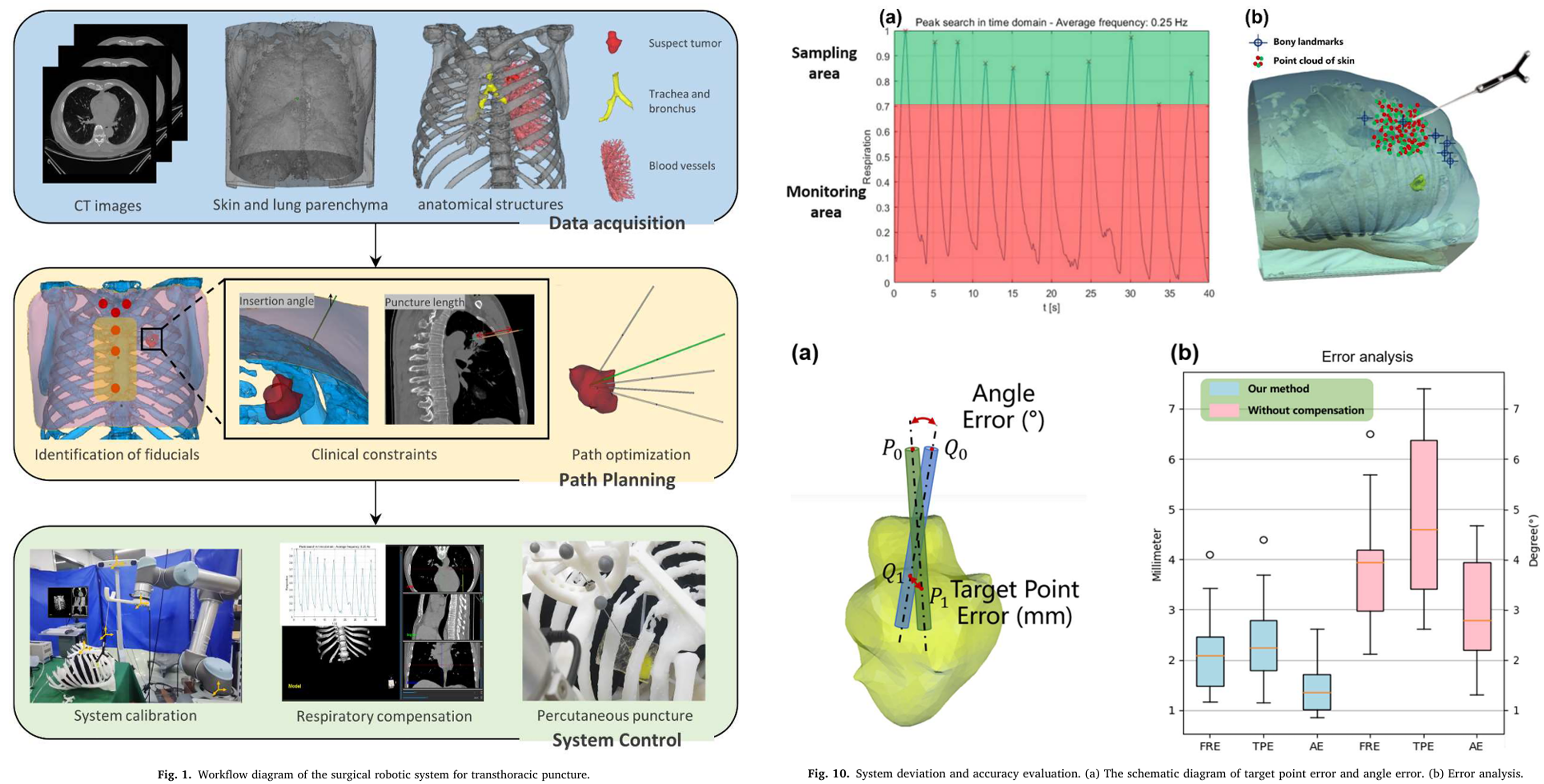
- 2024.01: 🎉 Our paper “A Robotic System For Transthoracic Puncture of Pulmonary Nodules Based on Gated Respiratory Compensation” has been accepted by Computer Methods and Programs in Biomedicine.
- 2023.05: 🏆 Awarded 1st prize for Outstanding Young Scholar Paper at BME2023, Suzhou, China.
- 2023.01: 🏆 Awarded the Agilent Scholarship for Excellence in Life Science. Grateful to Agilent for their support!
- 2022.06: 🎓 Graduated from SJTU with highest honors (Best Thesis, Honor Degree, and Outstanding Graduate of Shanghai)!
📖 Educations
- 2025.08 - present, Ph.D. in MechE, University of Illinois Urbana-Champaign
- 2022.09 - 2025.03, M.S. in MechE, Northwestern University & Shanghai Jiao Tong University (Dual Degree)
- 2018.09 - 2022.06, B.S. (Hons.) in MechE, Shanghai Jiao Tong University
🧑💻 Experiences
- 2023.09 - 2025.03, RA, Simpson Querrey Institute for Bioelectronics, Evanston.
- Advisor: Prof. John A. Rogers
- Projects
- Bioelastic haptic actuator
- Multi-modal haptic actuator
- Soft robot for organoid interface
- 2021.09 - 2023.09, RA, Institute of Biomedical Manufacturing and Life Quality Engineering, Shanghai.
- Advisor: Prof. Xiaojun Chen
- Projects
- Robot-assisted thoracic puncture system
- Fiber-optic respiration sensor
- Temporal medical image generation
- 2022.01 - 2022.10, Embedded Development Intern, Espressif, Shanghai.
- Mentors: Zhaocheng Zhan, Li Zhou
- Project: Mini Pupper (colabrate with Mangdang)
- 2021.06 - 2021.09, RA, Institute of Medical Robotics, Shanghai.
- Advisor: Prof. Anzhu Gao
- Project: redundant robot design and manipulation
- 2020.02 - 2021.02, RA, Institute of Robotics, Shanghai.
- Advisor: Prof. Jianjun Meng
- Project: motor imagery (MI)-based brain-computer interface (BCI)
Publications
Ongoing Works
-
[1] Multimodal Microscaled Soft Robotic Actuator for Human Organoids Interfaces
W. Maeng, Z. Lyu, K. Kim, K.-H. Ha, Y. Mao, S. Xu, L. Praba, Y. Hwang, J. A. Rogers. Submission planned Apr. 2025
-
[2] Efficient Tumor Localization During Respiration with Minimal Scanning Based on Recursive Deformable Diffusion Models
Y. Mao*, D. Li*, W. Sun, D. Zhao, C. Chen, X. Chen. Submitted Feb. 2025
Journals
-
[J1] Full Freedom-of-Motion Actuators as Advanced Haptic Interfaces
K.-H. Ha*, J. Yoo*, S. Li*, Y. Mao, S. Xu, H. Qi, H. Wu, C. Fan, H. Yuan, J.-T. Kim, M. Flavin, S. Yoo, P. Shahir, S. Kim, H.-Y. Ahn, E. Colgate, Y. Huang, J. A. Rogers. Science, Mar. 2025
-
[J2] Bioelastic State Recovery for Haptic Sensory Substitution
M. Flavin*, K.-H. Ha*, Z. Guo*, S. Li*, J.-T. Kim*, T. Saxena, D. Simatos, F. Al-Najjar, Y. Mao, S. Bandapalli, C. Fan, D. Bai, Z. Zhang, J. Yoo, M. Park, J. Shin, A. Huang, H. Shin, Y. Huang, Z. Xie, H. Jiang, J. A. Rogers. Nature, Nov. 2024
-
D. Li*, Y. Mao*, P. Tu, H. Shi, W. Sun, D. Zhao, C. Chen, X. Chen. Computer Methods and Programs in Biomedicine, Jan. 2024
Conferences
-
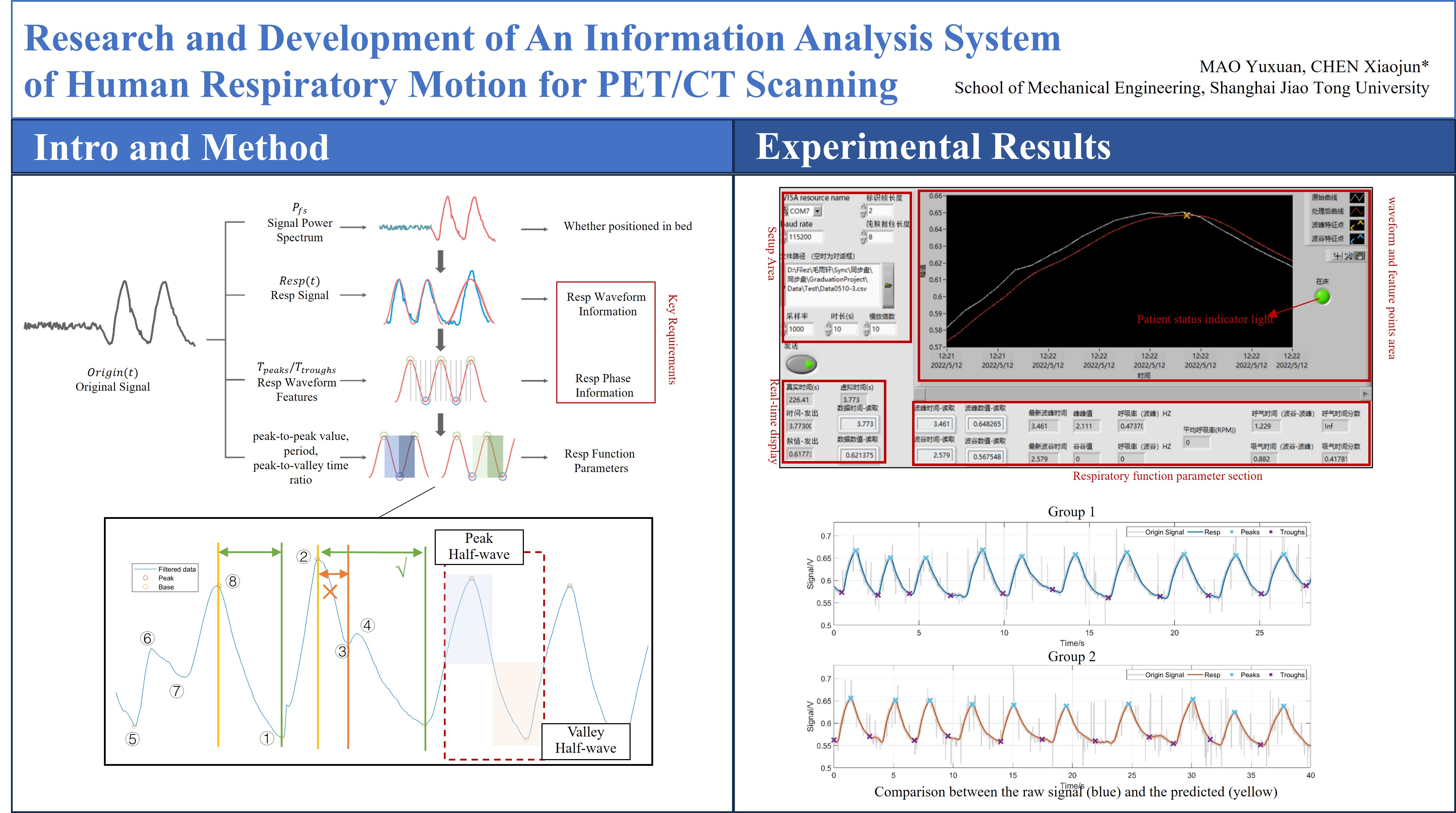
[C1] A Real-Time Respiratory Analysis System for PET-CT Based on Fiber-Optic Pressure Sensors
Y. Mao, P. Tu, W. Liu, Z. Liu, X. Chen. Oral, China Biomedical Engineering Conference, May. 2023.
-
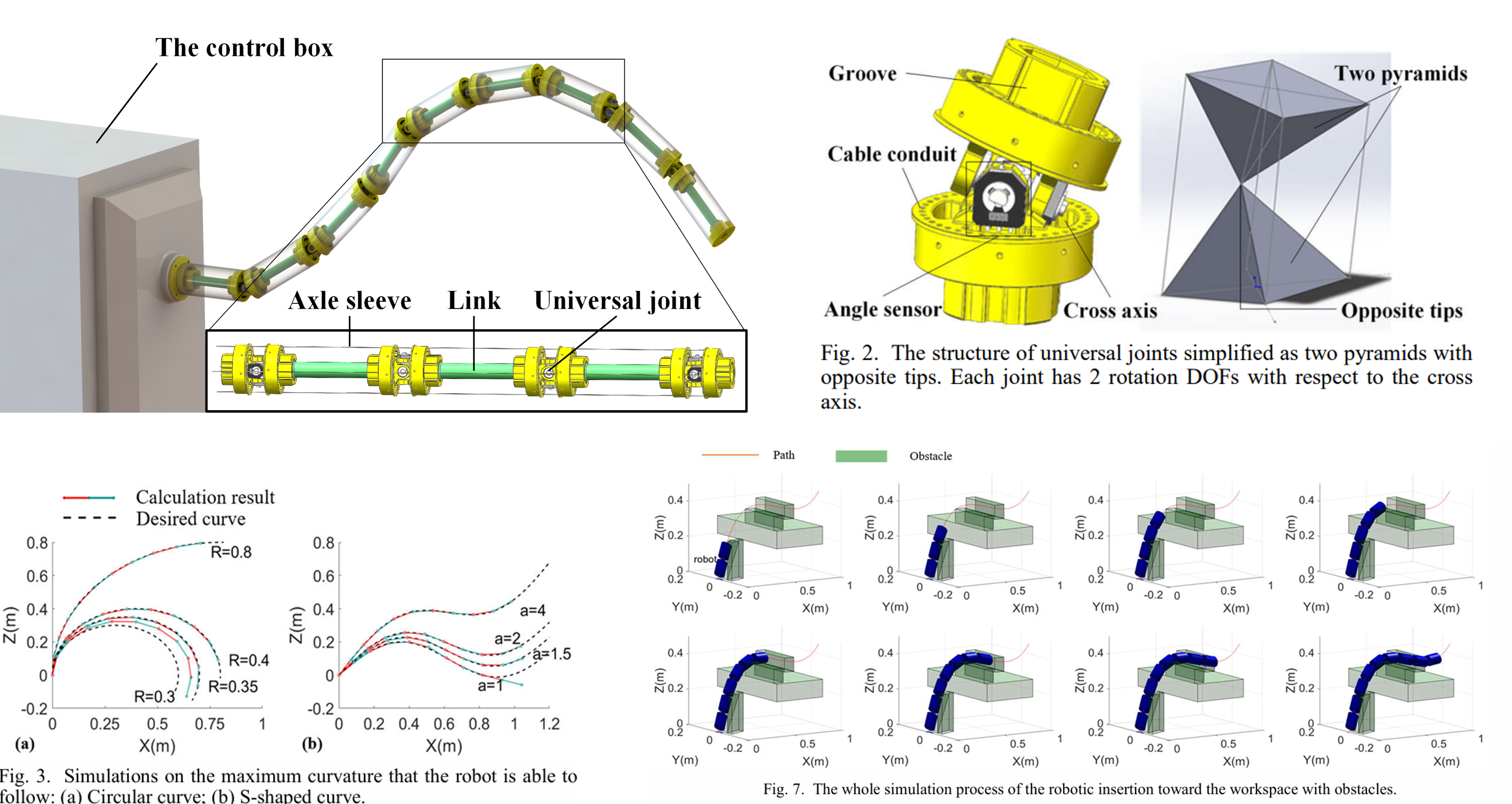
[C2] A Cable-Driven Hyper-Redundant Robot with Angular Sensing
Y. Mao, J. Yu, L. Wang, Y. Zou, Z. Lin, W. Chen, A. Gao. Oral, IEEE International Conference on Robotics and Biomimetics (ROBIO), Nov. 2021.
(* Equal Authorship)
Projects
Beyond research, I am passionate about designing innovative robots and AI models inspired by nature and daily life, translating concepts from textbooks into real-world technologies that enhance people’s lives.
Robots and Mechanisms
.gif)
Wrist Rehabilitation Assistive Device Based on 3-RRR Mechanism
Y. Mao, P. Lin, R. Liu, B. Liang, A. Sun, Y. Jin
- Utilizing an R-R-R spherical parallel mechanism, this device provides independent rotational movements in three degrees of freedom (DoF), covering the full range of wrist motion.
- Through force sensors and IMU, it enables accurate trajectory reproduction with controlled resistance, allowing wrist-injured patients to train muscles across 3 DoF with adaptive damping.
- Excellence in Technology Award, 2023 Mechatronics Fair, School of Mechanical Engineering.
Mini Pupper: A Lightweight, modular 12-DOF quadruped robot based on ESP32 Project | Video
MangDang Tech, Y. Mao, Z. Zhang
- Developed a lightweight, modular 12-DOF quadruped robot with all-stack skills.
- Verified the compatibility of ESP32 platform with Micro-ROS to expand its applicability in robotics.
Jumpiter: A Cam-Powered Dual-Mode Mobile-Jumping Robot
X. Xu, Y. Mao, H. Bai, Z. Mei, M. Xia
- The robot can perform both mobile motion and periodic jump reaching heights of up to 400 mm. It stores and releases energy through a cam and spring mechanism, while maintaining in-air orientation by sensing and adjusting its position mid-air using an IMU and flywheel.
- Granted utility model patent(CN215904637U).
A Curvature-Adaptive Roller Clamping Mechanism for Heavy Load Transportation on Staircases
H. Yan, Y. Mao, H. Mao, Z. Zhang
- Adaptable roller system that conforms to various staircase shapes and smoothly navigates corners.
- Integrated with a loading lever, enabling manual transportation of heavy loads with significantly reduced effort.
- 1st Prize, Shanghai Mechanical Engineering Innovation Competition; 2nd Prize, National Mechanical Engineering Innovation Competition
Artificial Intelligence
Dynamic Multi-Robot Swarm Formation Based on Distributed Control
Y. Mao, J. Yu, Z. Wang, F. Du
- Programmed a 5-robot swarm on the ROS using consensus algorithms to achieve distributed control, allowing dynamic formation adjustments based on obstacle detection
Cooperation and Confrontation in Multi-Agent Reinforcement Learning for RoboCup
Y. Mao, J. Liang, Z. Li, S. Chen
- Implemented a 2v2 soccer simulation training in Unity 3D using the Multi-Agents Posthumous Credit Assignment (MA-POCA) model, where agents demonstrated intelligent coordination in both offense and defense.
Real-time Chord Decomposition for Guitar Playing using FFT
Y. Mao
- Developed a program in LABView for real-time frequency domain analysis of captured audio using FFT, achieving 90% accuracy in decomposing guitar chords.
Awards
2023 1st Prize, Young Excellent Paper Competition, BME2023 (China) 2022 Agilent Scholarship (5/773) 2022 Excellent Bachelor Thesis of SJTU (Top 1%) 2022 Outstanding Graduate of Shanghai (Top 2%) 2019-2021 Zhiyuan Honors Scholarship (Top 5%) 2021 Guanghua Scholarship 2021 TYACHT Outstanding Student (5/424) 2021 Zhiyuan Outstanding Leader Scholarship 2021 COSCO-shipping Scholarship 2020 1st Prize, Shanghai Mechanical Engineering Innovation Competition 2020 2nd Prize, National Mechanical Design Competition 2019 Shanghai Scholarship (1/206)